Robot hand

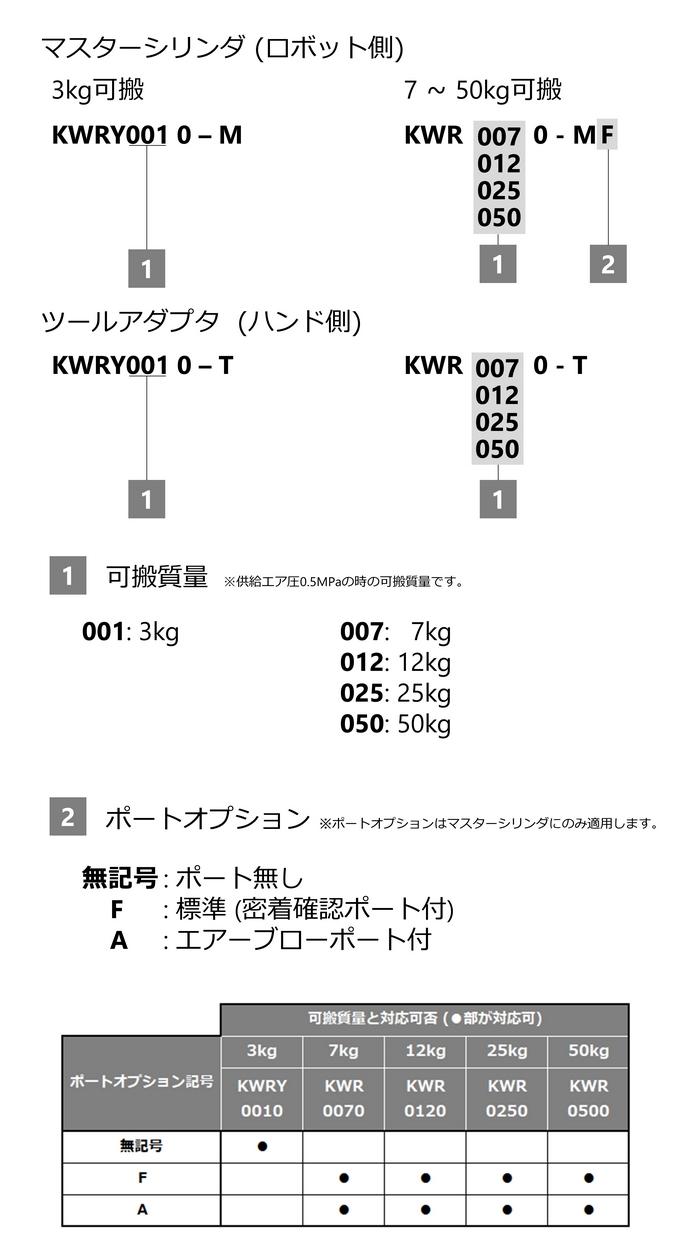
| 型式 | KWRY0010 | KWR0070 | KWR0120 | KWR0250 | KWR0500 | ||
|---|---|---|---|---|---|---|---|
| 可搬質量*1 | 0.5MPa時 | kg | 3 | 7 | 12 | 25 | 50 |
| 1MPa時 | kg | 6 | 12 | 20 | 45 | 90 | |
| 位置再現精度 | mm | 0.003 | |||||
| リフト量 (払出し量) | mm | 0.8 | 0.8 | 0.8 | 1.0 | 1.0 | |
| シリンダ 容量 |
ロック | cm3 | 0.64 | 1.50 | 2.38 | 6.08 | 14.38 |
| リリース | cm3 | 0.72 | 1.72 | 2.69 | 6.68 | 15.39 | |
| 駆動用 エア圧力 |
最高 使用圧力 |
MPa | 1.0 | 1.0 | |||
| 最低 使用圧力 |
MPa | 0.4 | 0.35 | ||||
| 耐圧 | MPa | 1.5 | 1.5 | ||||
| 0MPa時*2 | kN | 0.12 | 0.15 | 0.32 | 0.57 | 0.95 | |
| 0.35MPa時 | kN | - | 0.68 | 1.14 | 2.31 | 4.44 | |
| 0.4MPa時 | kN | 0.45 | 0.75 | 1.26 | 2.56 | 4.94 | |
| 0.5MPa時 | kN | 0.50 | 0.90 | 1.50 | 3.05 | 5.94 | |
| 1MPa時 | kN | 0.90 | 1.64 | 2.67 | 5.53 | 10.92 | |
| リフト力 (払出し力) |
0.35MPa時 | kN | 0.03 (0.4MPa時) |
0.11 | 0.16 | 0.38 | 0.77 |
| 0.5MPa時 | kN | 0.08 | 0.20 | 0.30 | 0.68 | 1.34 | |
| 1MPa時 | kN | 0.23 | 0.51 | 0.78 | 1.66 | 3.27 | |
| 許容静的 |
(0.5MPa時) |
N・m | 5 | 14 | 27 | 74 | 194 |
| 曲げ方向 (1.0MPa時) |
N・m | (10) | (25) | (45) | (135) | (350) | |
| ねじり方向 | N・m | 12 | 23 | 45 | 100 | 175 | |
| 最大負荷 |
曲げ方向 (0.5MPa時) |
N・m | 10 | 28 | 54 | 148 | 388 |
| 曲げ方向 (1.0MPa時) |
N・m | (20) | (50) | (90) | (270) | (700) | |
| ねじり方向 | N・m | 24 | 46 | 90 | 200 | 350 | |
| 使用温度 | ℃ | 0 ~ 70 | |||||
| 使用流体 | ドライエア | ||||||
| 製品質量*4 | マスター シリンダ |
g | 85 | 180 | 250 | 500 | 1000 |
| ツール アダプタ |
g | 60 | 120 | 160 | 300 | 750 | |
Rc1/8x4ポート |
|||||||
*1 機器選定時には、可搬質量と許容静的モーメントの両方を考慮願います。
*2 連結後にエア圧力が0MPaとなった場合の連結保持力であり、仕様を満足するものではありません。
*3 最大負荷モーメントで使用した場合、上記仕様を満足するものではありません。許容静的モーメント内でご使用ください。
*4 製品質量は、オプション類を含まない本体のみの質量を示します。


豊富なバリエーション世界の標準パワーチャック

抜群の把握力・安定性特殊対応チャック

品質管理と安全作業の必需品

多品種・少量生産に標準手締めチャック

チャック性能を引き出す高性能回転シリンダ
コンパクト・高精度チャックとの組合せもOK

トグルジョイント機構採用、大きい口金開き

シリンダ内蔵 治具に代わるステーショナリーチャック


テールストック、テールスピンドル、ロータリジョイント、ロータリチャック 他


kitagawaオリジナルの高品質、高耐久グリッパ
工場の自動化、無人化を強力にサポート

各種カタログをダウンロードできます

いろいろな商品チラシを閲覧できます

生産中止品のご案内を掲載しております。