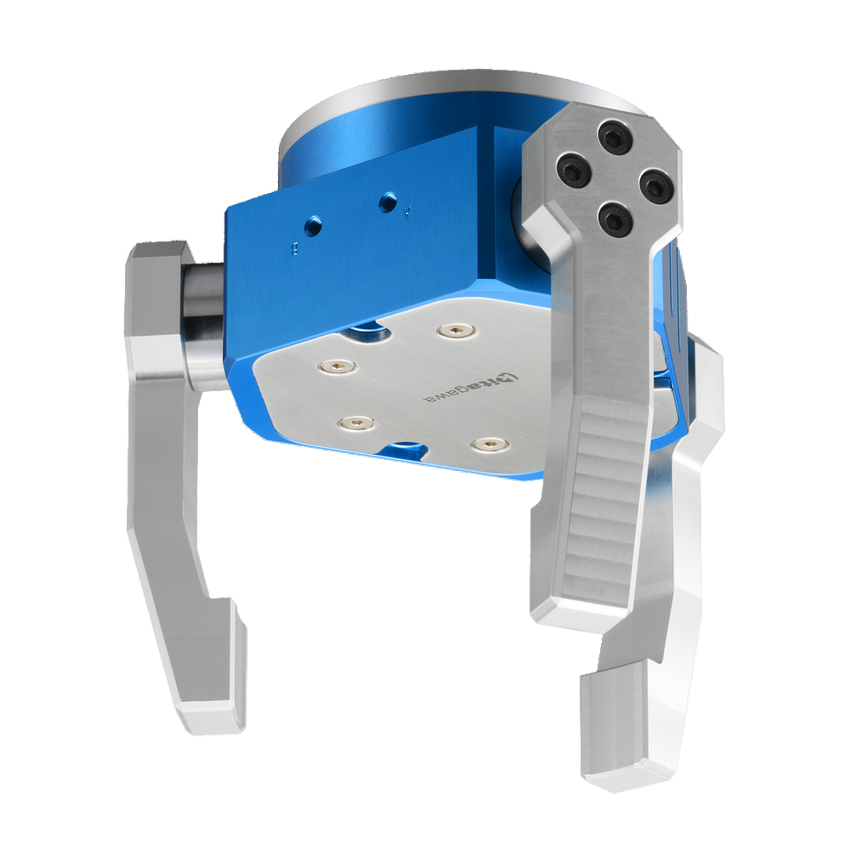
Robot hand
空圧が低下した際にもワークを脱落しないよう空圧回路に逆止弁を使用してください。
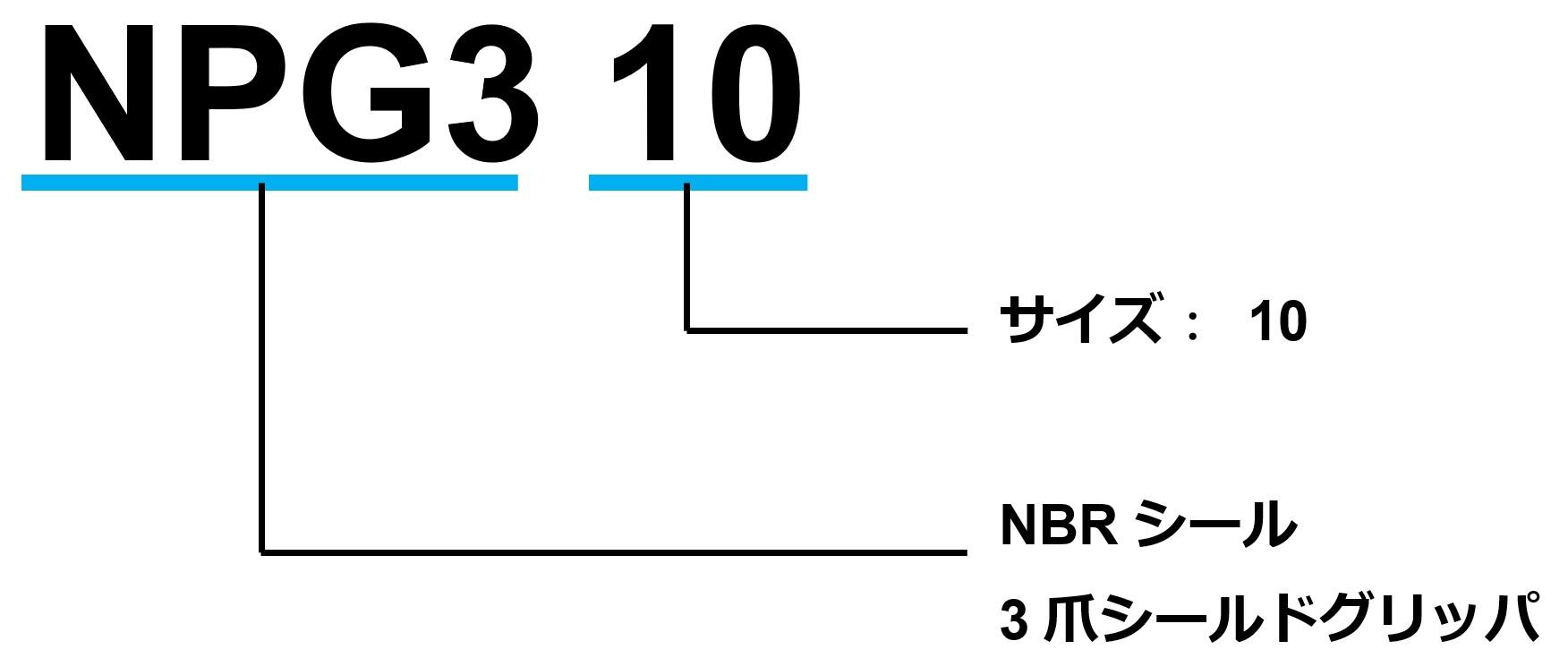
リードスイッチでジョーストロークを検出される場合は、商品の外周に取付溝を用意していますので、その溝を利用してリードスイッチを取り付けてください。
リードスイッチは最大2個まで取付け可能です。
| 型 式 | 直径での ジョーストローク (mm) |
把持力 F(注2) | 繰り返し 精度 (mm) |
(kg) |
流体消費量 |
(MPa) |
(℃) |
|||
|---|---|---|---|---|---|---|---|---|---|---|
L(mm) |
(N) |
(N) |
||||||||
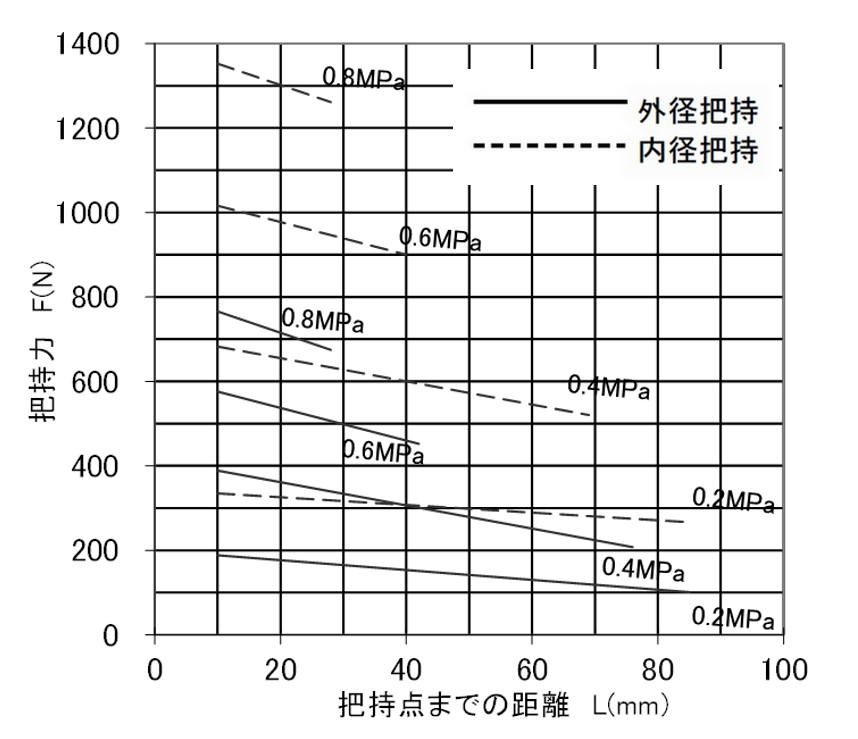
| NPG306 | 12 | 40 | 460 | 900 | ±0.01 | 0.5 | 33.3 | 0.2~0.8 | 5~60 | IP67 |
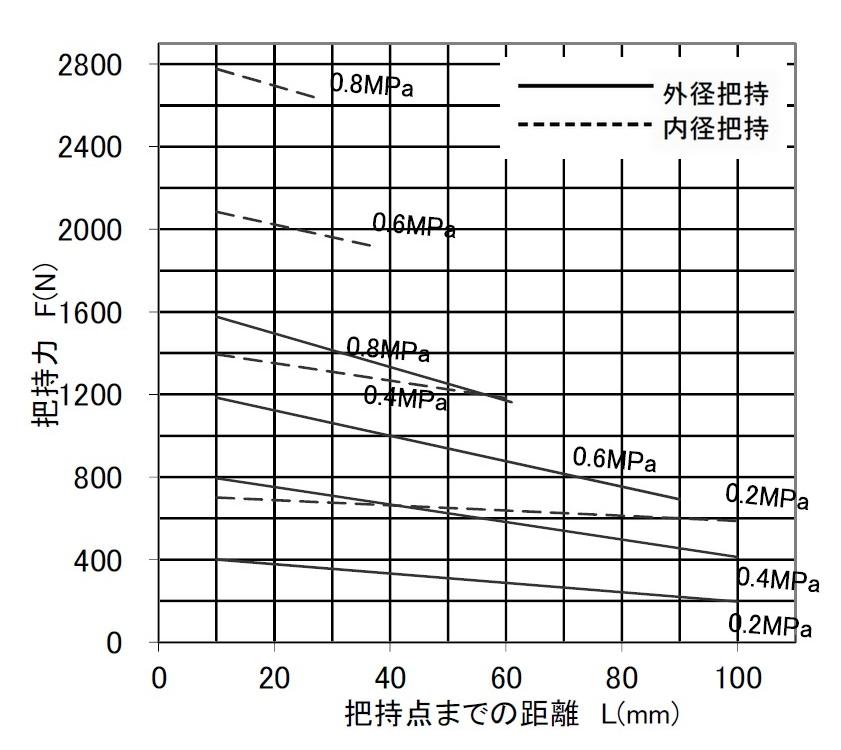
| NPG308 | 16 | 40 | 1000 | 1900 | ±0.01 | 1.3 | 68.4 | 0.2~0.8 | 5~60 | IP67 |
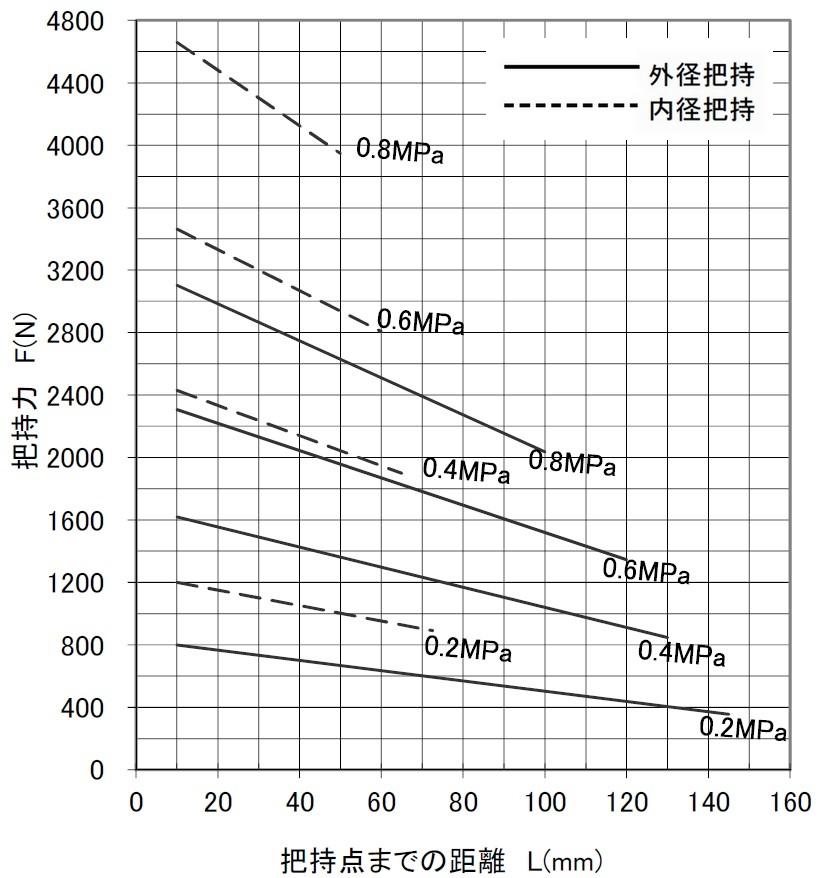
| NPG310 | 20 | 40 | 2000 | 3200 | ±0.01 | 2.1 | 139.7 | 0.2~0.8 | 5~60 | IP67 |
(注1) 測定距離はマスタージョー中心から把握中心までの距離です。
(注2) 把持力は供給空圧力0.6MPaでの値です。
各グリッパの許容負荷は以下のリンクで確認してください。
型式を選ぶと把持力線図を表示します。グラフの把持力 F は、1爪当たりの実測把持力 F1× 爪本数を表しています。
グリッパの型式、使用空圧力などの把持条件より把持力を計算します。
把持力を計算する

豊富なバリエーション世界の標準パワーチャック

抜群の把握力・安定性特殊対応チャック

品質管理と安全作業の必需品

多品種・少量生産に標準手締めチャック

チャック性能を引き出す高性能回転シリンダ
コンパクト・高精度チャックとの組合せもOK

トグルジョイント機構採用、大きい口金開き

シリンダ内蔵 治具に代わるステーショナリーチャック


テールストック、テールスピンドル、ロータリジョイント、ロータリチャック 他


kitagawaオリジナルの高品質、高耐久グリッパ
工場の自動化、無人化を強力にサポート

各種カタログをダウンロードできます

いろいろな商品チラシを閲覧できます

生産中止品のご案内を掲載しております。