Machine Tool
BR-AJC_E の特徴を動画で紹介します。
| 型式 | BR-AJC06E | BR-AJC08E | BR-AJC10E | |
|---|---|---|---|---|
| 寸法 | 全長 (mm) | 265 | ||
| 全高 (mm) | 140 | |||
| 全幅 (mm) | 139 | |||
| 質量 (kg) | 5.5 | |||
| 設定トルク (Nm) | 47 | 80 | 107 | |
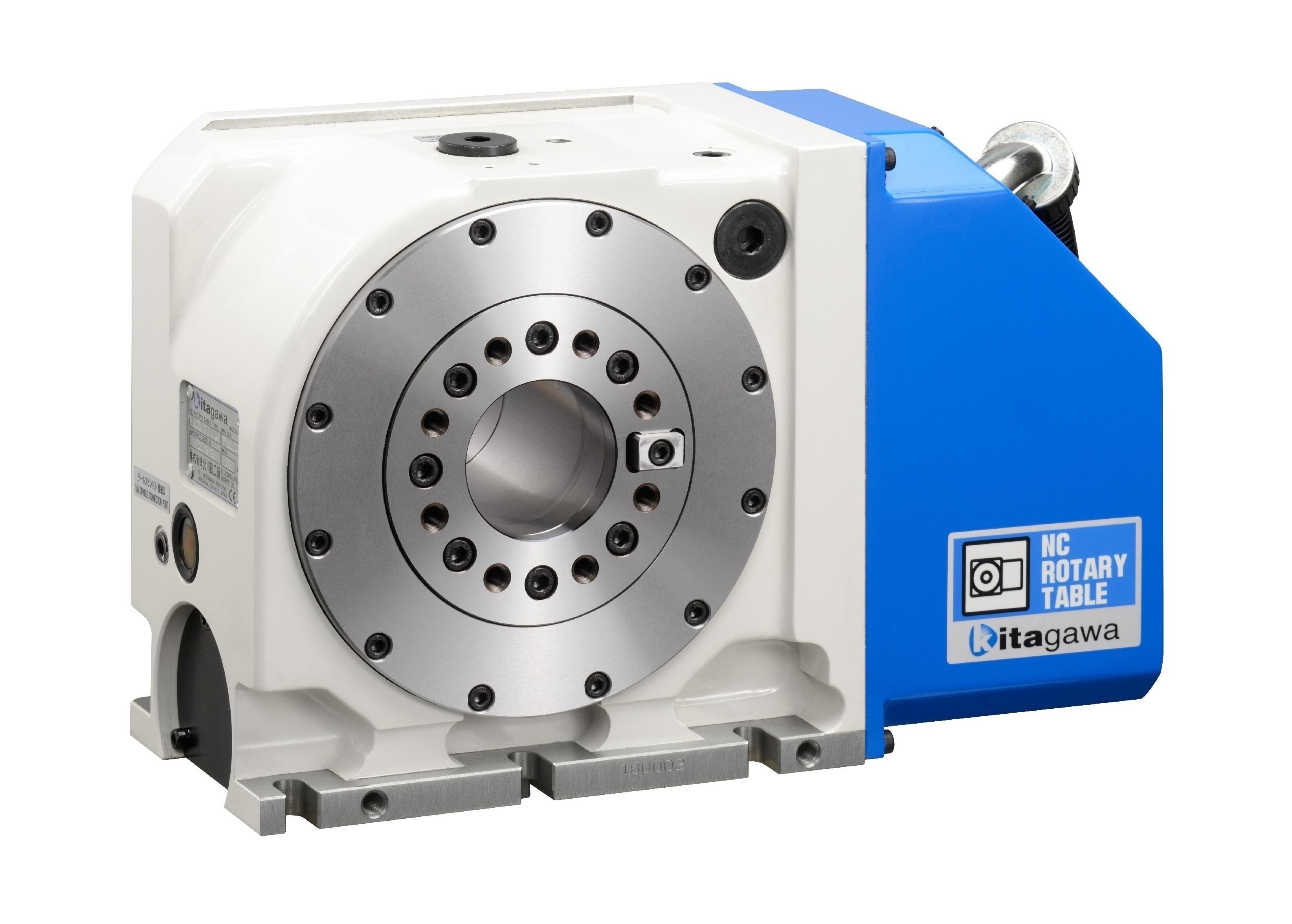
| 対応チャック | BR06 / BRT06 | BR08 / BRT08 | BR10 / BRT10 | |
| 対応ソフトジョー ※最大ジョー高さ: 56 mm |
SJ06B1 SJ06S1 SJ06A1T SJ06A1-066※ SJ06A1T066※ |
SJ08B1 SJ08S1 SJ08A1 SJ08A1-056 SJ08A1T056 |
SJ10B1 SJ10S1 SJ10A1 SJ10A1-056 |
|
※最大ジョー高さ 56mm 以下となるように、加工して使用してください。
| START | 空圧供給 | OFF= 停止、ON= 回転 | |
|---|---|---|---|
| 負荷 | 電磁弁 (DC24V/50mA 以上) | ||
| DIR | 回転方向切換 | OFF= 右回転 (締め付け方向)、ON= 左回転 (緩め方向) | |
| 負荷 | 電磁弁 (DC24V/50mA 以上) | ||
| LOW | OFF= 締め付け・緩めモード、ON= 微速逆回転モード | ||
| 負荷 | フォトカプラ (DC24V/20mA 以上) | ||
| 制御出力 | STOP | 停止 | ON= 設定トルク到達またはエラー検出 |
| 出力方式 | オープンコレクタ (DC24V/30mA 以下) | ||
| ERR | エラー | ON= エラー検出 ON条件 ・締め付け時トルク不足: 締め付けタイマー時間経過 (10秒) ・緩め時リミットトルク到達: 160Nmに到達 ・オーバートルク : 設定トルク+20Nm以上 |
|
| 出力方式 | オープンコレクタ (DC24V/30mA 以下) | ||
| 電源 | DC24V/10W 以上 | ||
| 設定トルク | 締め付け時: 20~150Nm/緩め時最大: 160Nm | ||
| 判定ランプ | 緑: START信号に同期して点灯 | ||
| 赤: ERR信号に同期して点灯 | |||

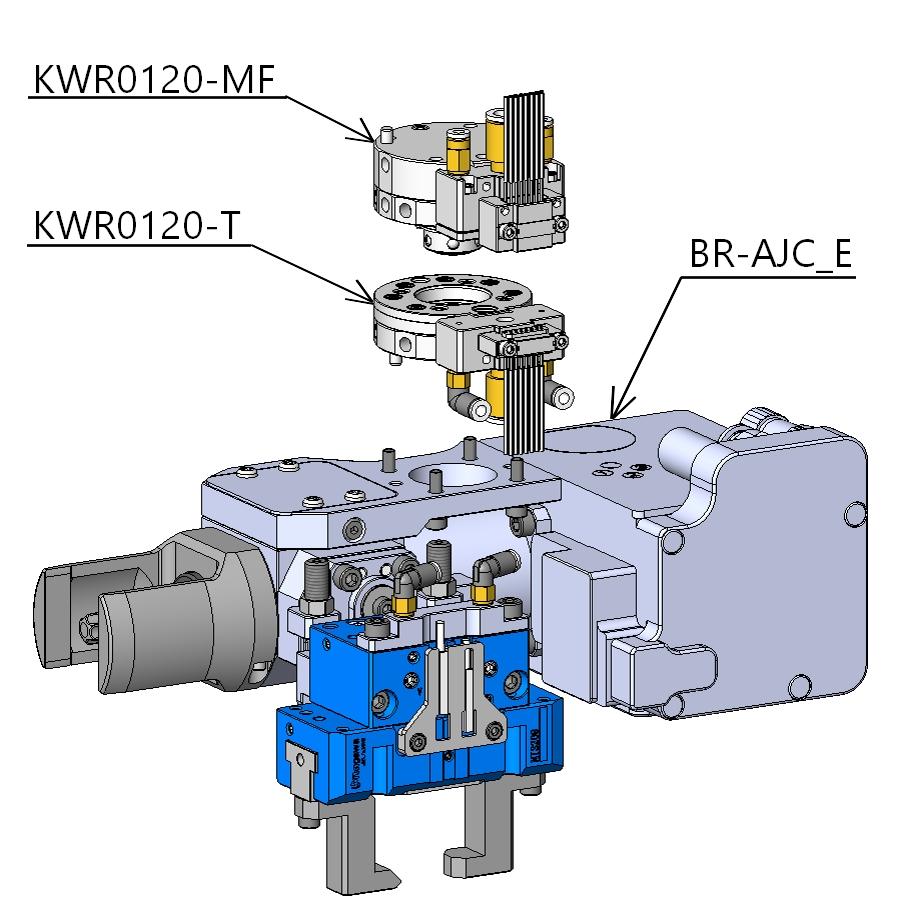
| 本体 | ワッシャ | Oリング付き |
|||||
|---|---|---|---|---|---|---|---|
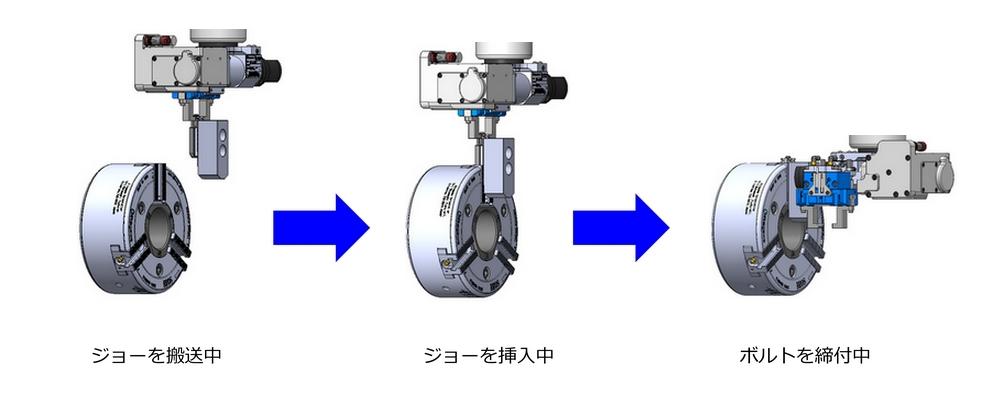
| BR-AJC-E ジョー搬送用 |
BRAJCL06 | BRAJCWT10 | BRAJCWS10 | BRAJCBT10 | BR-AJC06S | ||
| BR08 / BRT08 | BRAJCL08 | BRAJCWT12 | BR-AJC08M | BRAJCWS12 | BRAJCBT12 | BR-AJC08S | |
| BR10 / BRT10 | BRAJCL10 | BR-AJC10M | BR-AJC10S |
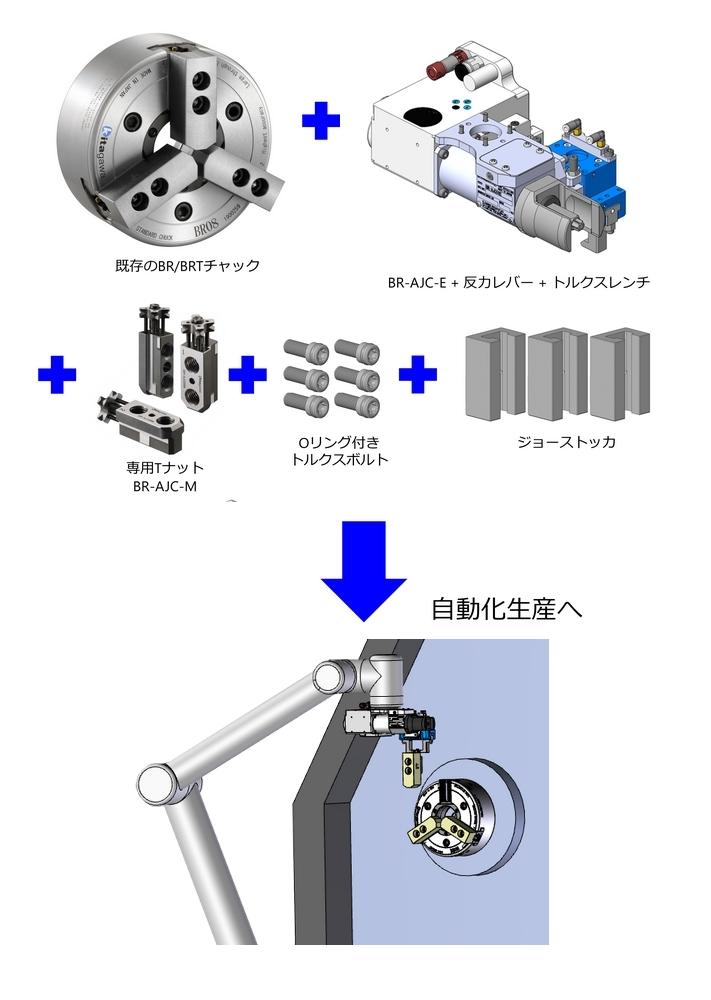
本体 (反力レバー、トルクスレンチ付)
| 型 式 | BR-AJC06E | BR-AJC08E | BR-AJC10E | |
|---|---|---|---|---|
| 2D |  |
|
|
|
| TIF |  |
|
|
|
| DXF |  |
|
|
|
| DWG |  |
|
|
|
| 3D | Parasolid |  |
|
|
| STEP |  |
|
|
|
専用Tナット
| 型 式 | BR-AJC06M | BR-AJC08M | BR-AJC10M | |
|---|---|---|---|---|
| 2D | |
|
|
|
| TIF | |
|
|
|
| DXF | |
|
|
|
| DWG | |
|
|
|
| 3D | Parasolid | |
|
|
| STEP | |
|
|
|
ワッシャ
| 型 式 | BRAJCWS10 | BRAJCWS12 | |
|---|---|---|---|
| 2D | |
|
|
| TIF | |
|
|
| DXF | |
|
|
| DWG | |
|
|
| 3D | Parasolid | |
|
| STEP | |
|
|
Oリング付きトルクスボルト
| 型 式 | BRAJCBT10 | BRAJCBT12 | |
|---|---|---|---|
| 2D | |
|
|
| TIF | |
|
|
| DXF | |
|
|
| DWG | |
|
|
| 3D | Parasolid | |
|
| STEP | |
|
|
ジョーストッカ
| 型 式 | BR-AJC06S | BR-AJC08S | BR-AJC10S | |
|---|---|---|---|---|
| 2D | |
|
|
|
| TIF | |
|
|
|
| DXF | |
|
|
|
| DWG | |
|
|
|
| 3D | Parasolid | |
|
|
| STEP | |
|
|
|

豊富なバリエーション世界の標準パワーチャック

抜群の把握力・安定性特殊対応チャック

品質管理と安全作業の必需品

多品種・少量生産に標準手締めチャック

チャック性能を引き出す高性能回転シリンダ
コンパクト・高精度チャックとの組合せもOK

トグルジョイント機構採用、大きい口金開き

シリンダ内蔵 治具に代わるステーショナリーチャック


テールストック、テールスピンドル、ロータリジョイント、ロータリチャック 他


kitagawaオリジナルの高品質、高耐久グリッパ
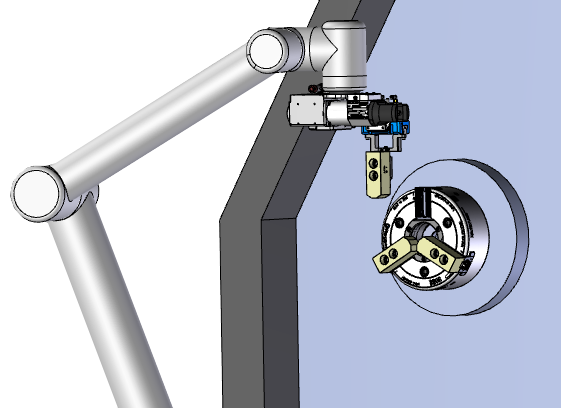
工場の自動化、無人化を強力にサポート

各種カタログをダウンロードできます

いろいろな商品チラシを閲覧できます

生産中止品のご案内を掲載しております。